
ステッピングモーターは、その高い精度と信頼性で、現代の自動化技術において不可欠な要素です。
工業ロボット、精密機械加工、医療機器など、多岐にわたる分野で利用されており、複雑な動作を繰り返し正確に実行するための鍵となっています。
本記事では、ステッピングモーターの基本構造から始まり、その動作原理、主要な特性、そしてさまざまなタイプのステッピングモーターについて詳しく解説し、更に応用技術であるマイクロステッピングについて解説します。
ステッピングモーターとは?
ステッピングモーターの基本構造と特徴

<基本構造>
ステッピングモーターは、二つの主要部品で構成されています。
固定子(ステータ)
固定子はモーターの外側に位置し、複数のコイルが配置されています。これらのコイルには順番に電流が流され、磁場が生成されます。
回転子(ロータ)
回転子は中心に位置し、固定子によって生成される磁場の影響を受けて回転します。
<特徴>
精度:
ステップごとの移動は非常に正確で、再現性が高いです。
簡単な制御:
デジタル信号による制御が可能で、複雑なフィードバックシステムが不要です。
保持トルク:
電源がオフの状態でも、残留磁気による一定のトルクで位置を保持することができます。
電気パルスによる回転制御の仕組み
ステッピングモーターには、1パルスあたりの回転角度(ステップ角)、または1回転させるために必要なパルス数(ステップ数)が定められています。
この電気パルスを何パルス入力するかによって、回転量が決まります。
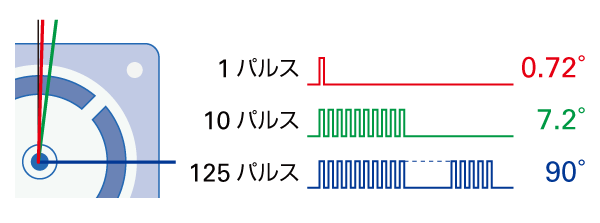
例えば、ステップ角0.72°のモーターの場合、10パルスで7.2°、125パルスで90°回転します。
他のモーターとの違い
モーターには、ステッピングモーターの他に、DCモーター・ACモーター・サーボモーターがあります。
ここでは各モーターの特徴をご紹介します。
| モーターの種類 | 特徴 | 電源 | 制御信号 | 制御方法 | 回転速度 | 停止位置 |
|---|---|---|---|---|---|---|
| ステッピングモーター | ・パルス信号により回転速度と停止位置を簡単に制御できる ・停止時も通電することでトルクを保持できる ・高速回転では脱調しやすい | 直流 | パルス信号 | オープンループ制御 | パルスの周波数で調整できる | パルス数で調整できる |
| DCモーター | ・直流電源のため、バッテリーでも駆動できる ・PWM制御により、回転速度を簡単に制御できる ・位置制御ができない(連続回転のみ) ・ブラシの摩耗によりメンテナンスが必要になる | 直流 | 電源が制御信号 | オープンループ制御 | 電源(直流)のPWM制御で調整できる | 制御できない(連続回転) |
| ACモーター | ・交流電源のため、家庭用コンセントで長時間運転できる ・構造が堅牢で耐久性が高い ・位置制御ができない(連続回転のみ) | 交流 | 電源が制御信号 | オープンループ制御 | 電源(交流)の周波数で調整できる | 制御できない(連続回転) |
| サーボモーター | ・位置,速度,トルクを高精度に制御できる ・エンコーダにより現在位置を常時検出し、補正できる ・高速,高負荷でも安定して動作し、脱調しにくい ・制御構成が複雑で、導入コストが高い | 直流(DCサーボ) または 交流(ACサーボ) | 位置・速度・トルクなどの目標値 (PWM信号、パルス信号、デジタル通信など) | クローズドループ制御 (エンコーダ情報をフィードバック) | 制御信号(目標値)により調整できる | 制御信号(目標値)により調整できる |
ステッピングモーターの種類
相数による分類:2相、3相、5相
2相、3相、5相とは、固定子にあるコイルのグループ数を指します。
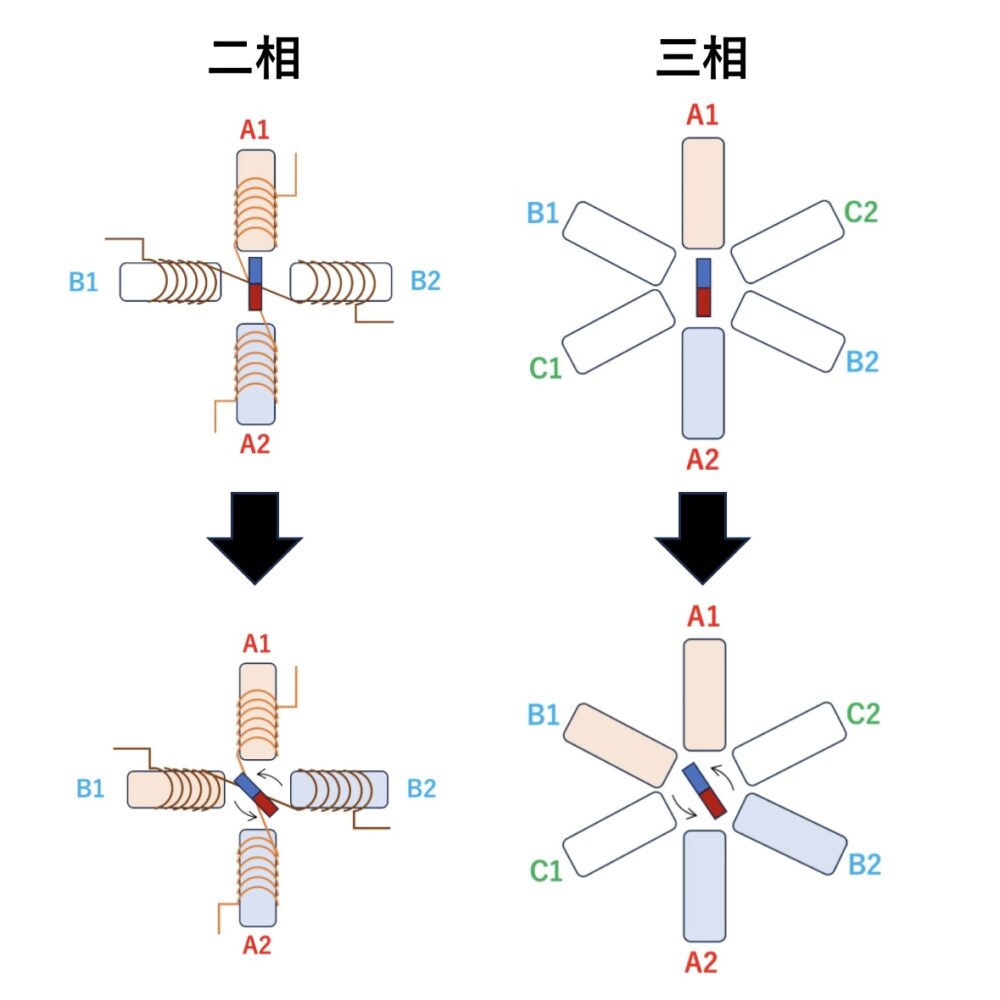
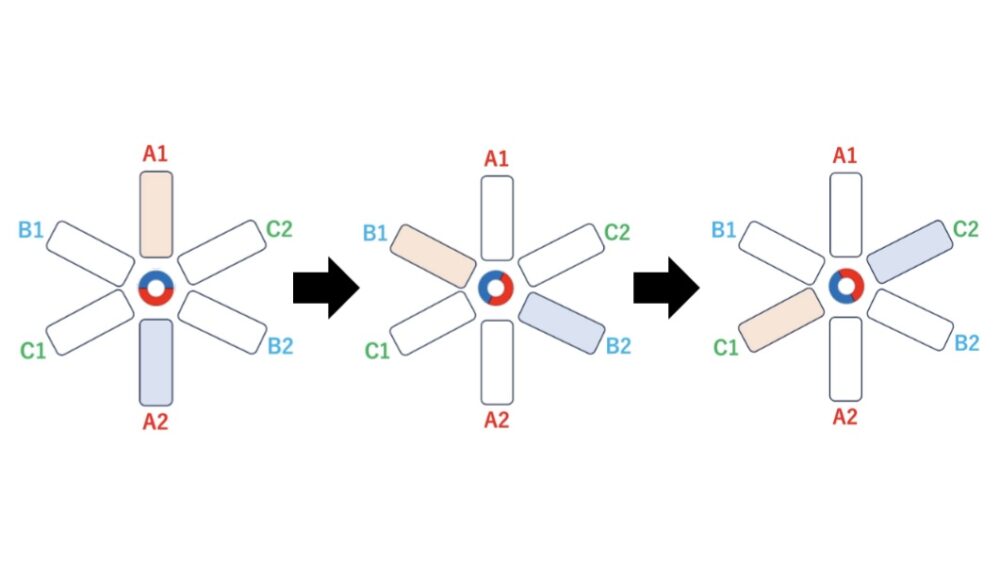
ステッピングモーターは、固定子のコイルに電流を流すことで磁力を発生させ、回転子の歯を引き寄せます。
電流を流すコイルグループ(相)を切り替えることで時計のように一定の角度ずつ動いて回転します。
コイルグループ(相)が増えるほど、ステップ角が小さくなり、位置決め精度が向上します。一方で、コイルを制御するための回路が複雑になり、コストも上がります。
駆動方式による分類:バイポーラ型とユニポーラ型
バイポーラ型とユニポーラ型は、コイルに電流を流す方向(双方向か単方向か)に基づく分類です。
<バイポーラ型>
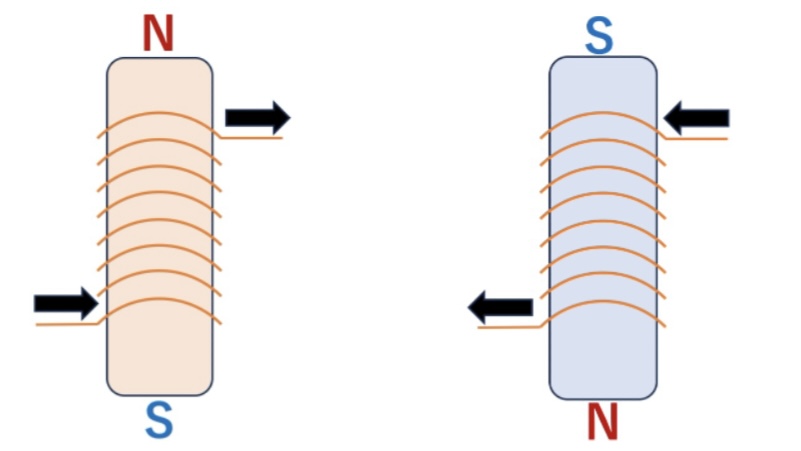
コイルに1本の巻線が設けられ、その巻線に双方向に電流を流す駆動方式です。電流を流す方向を切り替えることで、コイルの極性を変更します。
電流の向きを変える必要があるため、回路が複雑になります。
<ユニポーラ型>
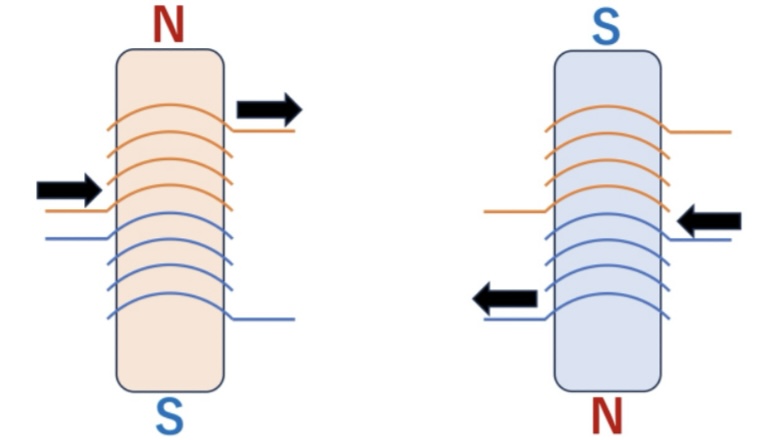
コイルに2本の巻線が設けられ、それぞれ単方向に電流を流す駆動方式です。電流を流す巻線を切り替えることで、コイルの極性を変更します。
電流を流す巻線はスイッチングで切り替えられるため、バイポーラ型よりも回路が単純で制御が容易です。しかし、各コイルで使用できる巻線の長さが半分になるため、バイポーラ型に比べて出力トルクが低下します。
構造による分類:PM型、VR型、HB型
PM型、VR型、HB型は、主に回転子の構造に基づく分類です。
<PM(Permanent Magnet)型>
回転子に永久磁石を使用しており、固定子のコイルで磁場が生成されると、その磁場が永久磁石に作用して回転子を動かします。
<VR(Variable Reluctance)型>
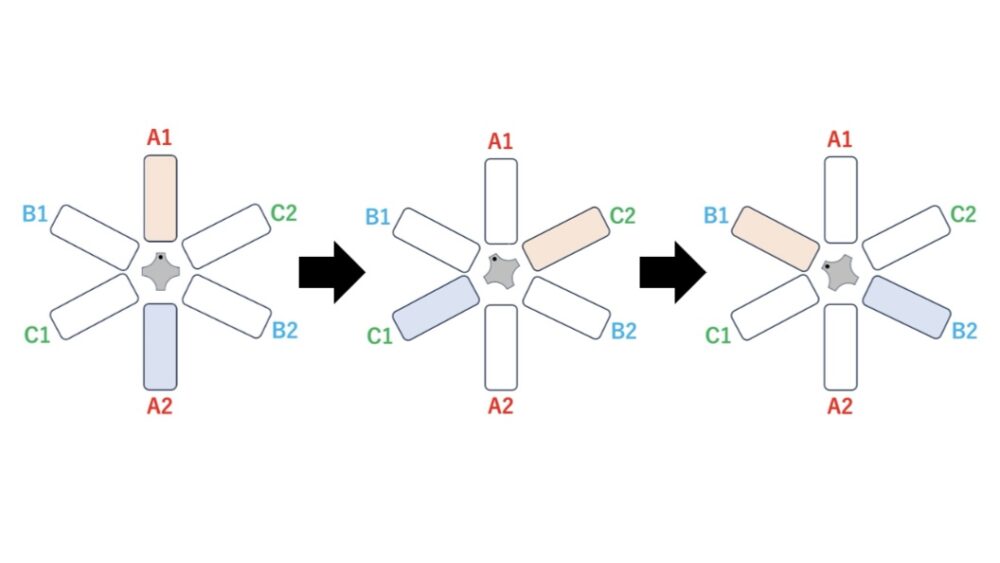
VR型は、回転子に磁石を使用せず、代わりに鉄の歯がついた回転子を使用しています。
固定子のコイルで磁場が生成されると、回転子の歯が引き寄せられて回転します。
<HB(Hybrid)型>
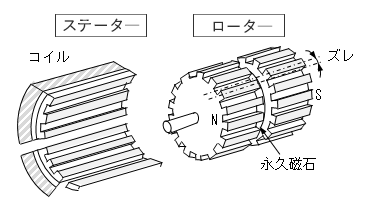
HB型は、PM型とVR型の特徴を組み合わせたもので、回転子には永久磁石と鉄の歯が使用されています。
これにより、高いトルクと精密な制御が可能になります。
ステッピングモーターの選び方
ステッピングモーターを選定する際には、単に回転させるだけでなく、「何をどの程度の精度・速度・トルクで動かしたいか」を明確にすることが重要です。
以下に、代表的な用途別に適したステッピングモーターの選定ポイントをまとめます。
位置決め精度が求められる用途
例:CNC機械、3Dプリンタ、半導体装置など
- 推奨構造:
HB型 - 相数:
5相(微細なステップが可能) - 駆動方式:
バイポーラ駆動(トルク効率が高い)
微細なステップ角と高トルクが得られるHB型+マイクロステップ駆動を選ぶと、滑らかな動作と高精度な位置制御が可能になります。
位置決め用途では、ステッピングモーターだけでなく、リニアガイドやボールねじなどの直動機構との組み合わせも重要です。
コスト重視・簡易な駆動が求められる用途
例:安価な自動化機器、小型装置、搬送装置など
- 推奨構造:
PM型 - 相数:
2相(駆動回路も簡単) - 駆動方式:
ユニポーラ駆動(ドライバが安価)
精度やトルクよりもコストや制御の簡便さを重視するなら、PM型かつユニポーラ駆動のシンプルな構成が向いています。
負荷変動が大きい or 高トルクが必要な用途
例:自動バルブ、工作機械の送り軸など
- 推奨構造:
HB型 - 相数:
5相(トルクリップルが少なく安定動作) - 駆動方式:
バイポーラ駆動
脱調を防ぎたい場合は、より多相でスムーズな回転が可能な5相ステッピングモーターを選ぶと安定性が向上します。
応用技術:マイクロステッピングによる精密制御
マイクロステッピングは、ステッピングモーターをさらに精密に制御するための手法です。
通常のステッピングモーターは、コイルへの電流供給のON/OFFのみを制御するため、大きなステップで回転します。
一方、マイクロステッピングの場合、PWM制御などによりコイルに流す電流量を調整することができます。これにより、ステッピングモーターを、より細かい角度で制御することができます。
マイクロステッピングは、モーターにかかる機械的な負担を軽減できるメリットもありますが、この技術を最大限に活用するためには、高品質のドライバーと正確な電流制御が必要です。